Using
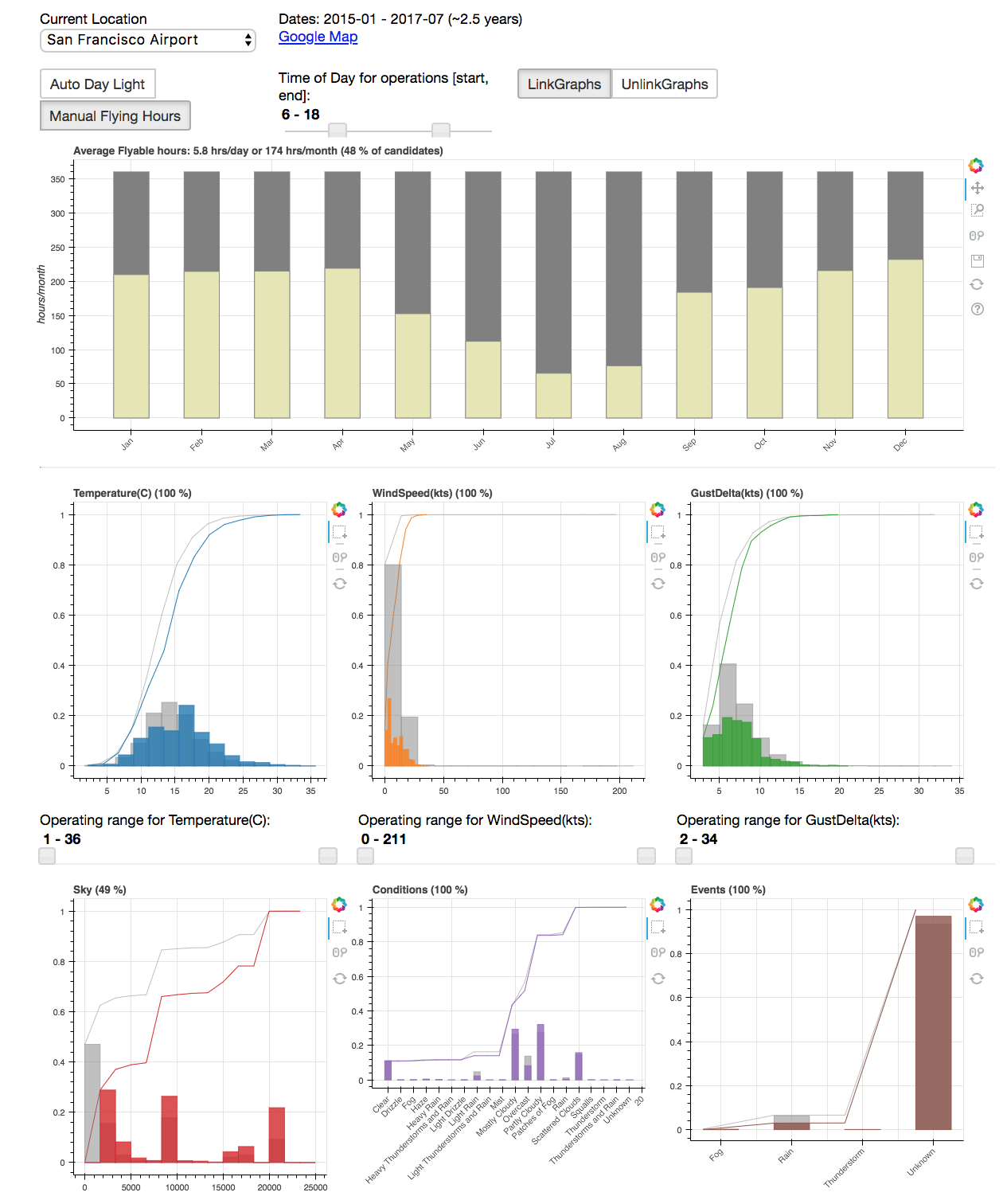
Beautiful Soup, I scraped weather data relevant to aeronautical operations (winds, temperatures, clouds, rainfall, etc.) for different locations.
I computed cumulative histrograms, and linked the different criteria to each other. Then using an interactive display (built on
Bokeh), I made it possible to adjust criteria to determine the number of flyable days for each location, and visualize the sensitivity to the different parameters.
Z. Mahboubi